Projects
Full Perception Pipeline in ROS
Object detection/tracking/fusion based on Apollo in ROS. Complete lidar/camera/radar perception pipeline.
View Project
Automated Valet Parking
Automated Valet Parking demo presented by Magna at CES 2019. Worked on low cost localization solution.
View Demo
System Integration
Achieved the 1st team to successfully implement a completely autonomous vehicle system on a Lincoln MKZ, including 3 integrated modules of perception, planning, and control, based on ROS and Autoware. Go Vulture!
View Project
Multi-View 3D Object Detection Neural Network
Predicted 3D bounding boxes of vehicles and pedestrians from Lidar point cloud and camera images and exploited multimodal sensor data and automatic region-based feature fusion to maximize the accuracy.
View Demo
Lidar Odometry and Mapping
Implemented a real-time processing system for simultaneously localizing the vehicle and building high- precision maps over large areas with 3D details from Lidar point cloud data.
View Demo
Path Planning
Built a path planning algorithm using Finte State Machine in C++ for a car to navigate a 3-lane highway efficiently, and generated smooth and safe path using localization, sensor fusion and map data.
View Project
Lane Line Finding
Detected lane-lines in the camera image using OpenCV by employing camera calibration, color transformation, gradient operation and identifying the lane-line pixels. Predicted the curvature of the road as well as the off-center distance of the vehicle.
View Project
Vehicle Detection
Recognized vehicles in the camera image by performing a Histogram of Oriented Gradients (HOG) feature extraction on a labeled training set of images and trained a linear Support Vector Machine (SVM) classifier in OpenCV.
View Project
Driving Behavior Cloning
Developed a Convolution Neural Network (CNN) in Keras that can predict steering angles from road images, and created video of good human driving behavior in simulator to train the model. After training, the model can drive the car autonomously around the track successfully.
View Project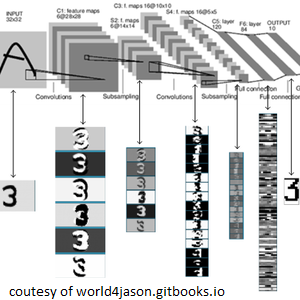
Traffic Sign Classifier
Built a Deep Neural Network (DNN) using TensorFlow and trained the model using the public German Traffic Sign Dataset with GPU acceleration. The model is able to reach accuracy of 91.2% on test set after training.
View Project
Sensor Fusion
Implemented Extended and Unscented Kalman Filter in C++ to execute the sensor fusion of noisy Lidar and Radar measurements and estimate the moving state with lower than 0.1 m error.
View Project
Vehicle Localization
Designed a 2D Particle Filter in C++ to locate the vehicle, given a map, chatter sensor and control data.
View Project
Model Predictive Control
Controlled the vehicle to drive around the track using Model Predictive Control (MPC) in C++, and resolved the latency issue of actuators, such as steering angle and throttle/brake pedal.
View Project